ライダー(LiDAR)とは何ですか? Lidar は、レーダー測距機能とカメラの角度分解能を組み合わせて、正確な深度認識センシングを提供して画像を完成させます (図 1)。

図 1: カメラ、レーダー、ライダーは自動運転に最適な 3 つのテクノロジーです。 (画像クレジット: ADI)
視覚的な部分は、カメラまたはドライバーの可視性、オブジェクトの分類、および横方向の解像度を表します。暗闇や、雪、埃、雨などの気象条件によって、これらの能力が損なわれる可能性があります。レーダー部分は RF 信号の戻りを表します。この信号は気象条件や暗闇の影響を受けず、距離も測定します。 LIDAR 部分は、さらなる物体分類、横方向解像度、測距、および暗部透過を提供することにより、センシング画像を完成させることができます。
ライダーはどのように機能しますか?
LIDAR システムの基本要素には、方形波送信機システム、ターゲット環境、および環境内の外部要素までの距離を解釈するために使用される光受信機システムが含まれます。 LIDAR センシング方法では、パルス レーザーの形で光を使用し、返された信号の飛行時間 (ToF) を分析することで距離を測定します (図 2)。
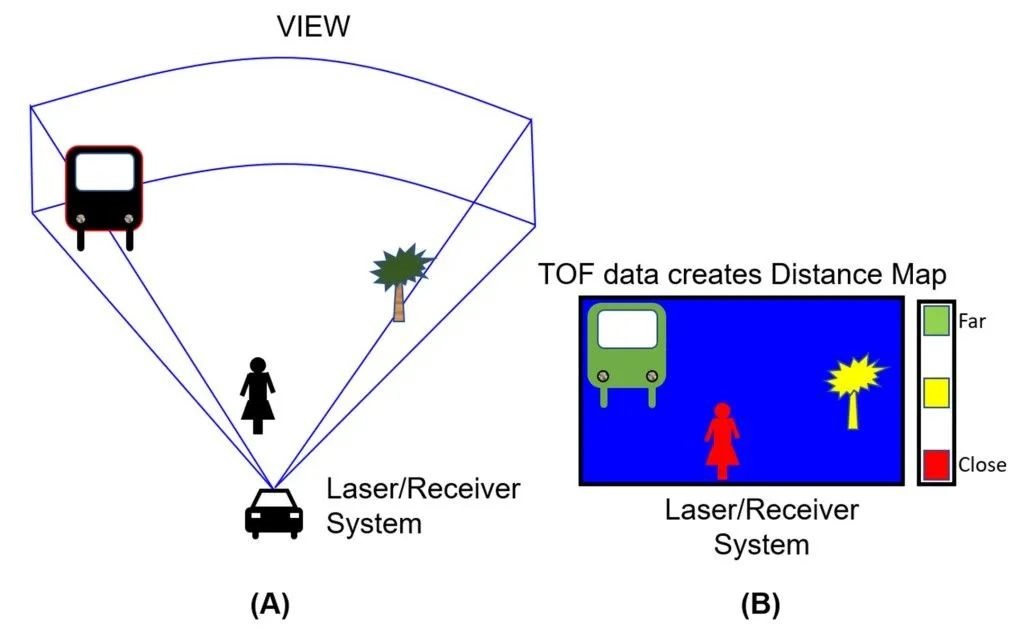
図 2: 各 LIDAR 送信ユニットには三角形の「視野」があります。 (画像クレジット: ボニー・ベイカー)
距離の描画は光デジタル信号に依存します。
デジタル領域の信号
LIDAR の回路ソリューションは、車載トランスインピーダンス アンプを介した信号受信の問題を解決することです。入力段は、光検出器からの負の入力電流パルスを受け入れるために使用されます (図 3)。

図 3: LIDAR の電子部分は、レーザー ダイオード送信機と 2 つのフォトダイオード受信機で構成されます。 (画像クレジット: ボニー・ベイカー)
レーザー ダイオードはガラスを通してデジタル パルスを送信します。この信号は D2 フォトダイオードにも反映されます。この信号の処理により、システムに組み込まれた通過時間と電子遅延が提供されます。
デジタル光信号パルスは物体に当たり、反射されて光学システムに戻ります。戻ってくるパルスは第 2 フォトダイオード D1 に反射されます。 D1 信号パスの電子部分は D2 信号パスと同じです。飛行時間は、2 つの信号がマイクロコントローラー (MCU) に到達した後に計算できます。
市場のスナップショット
自動車用 LIDAR システムは、パルス レーザー光を使用して 2 台の車両間の距離を測定します。自動車システムはライダーを使用して、交通状況の突然の変化に応じて車速とブレーキシステムを制御します。 LiDAR は、衝突警告および回避システム、車線維持支援、車線逸脱警報、ブラインドスポット モニター、アダプティブ クルーズ コントロールなどの半自動または全自動の自動車支援機能で重要な役割を果たします。自動車用ライダーは、以前の車両自動化システムのレーダー システムを置き換えています。 LIDAR システムの範囲は数メートルから 1,000 メートルを超えるものまであります。
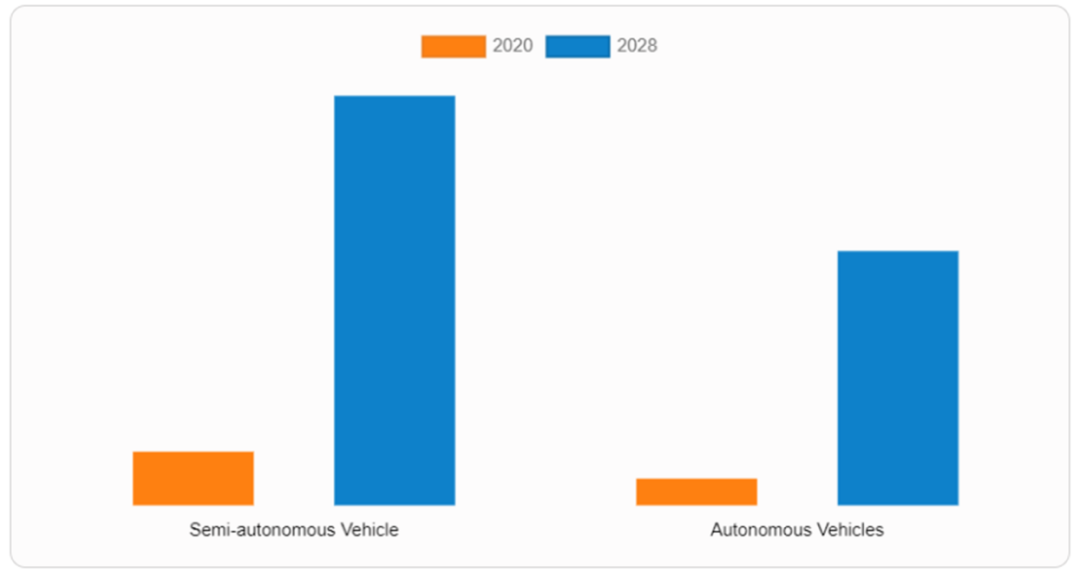
図 4: 自動車用 LiDAR 市場は、半自律型車両アプリケーションと完全自律型車両アプリケーションに分類されます。 (画像出典: Allied Market Research)
自動運転車はすでに広く普及しており、LiDAR イメージング システムによって状況はさらに改善されるでしょう。レーダー、カメラ、ライダー装置は依然として半自動運転および完全自動運転に最適な技術であり、ライダーの価格は下落しており、市場はこの変化を加速させています。
Copyright @ 2020 Shenzhen Box Optronics Technology Co., Ltd. - 中国光ファイバーモジュール、ファイバー結合レーザーメーカー、レーザー部品サプライヤーすべての権利予約。